Equipos de alimentación e inserción
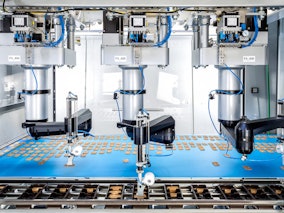
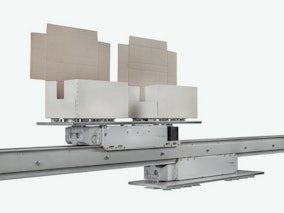
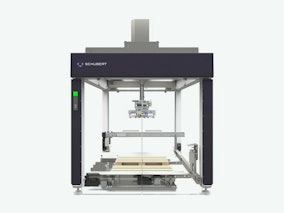
Los sistemas robóticos Limpieza in situ (CIP en inglés)k-and-place de Schubert envasan productos desnudos o preenvasados de diversas consistencias en materiales de embalaje. Las líneas de recogida están diseñadas para cambiar fácilmente de aplicación, es decir, de trabajos de recogida con bandejas de plástico desapiladas a otros con bandejas de cartón montadas. Disponibles en diseños Scara o Delta, los sistemas Limpieza in situ (CIP en inglés)k-and-place incorporan el sistema de visión Schubert y utilizan el principio de contraflujo para garantizar la calidad del producto y el llenado completo de las bandejas. Son posibles soluciones escalables y personalizadas en función de las necesidades del cliente; la mayor máquina de Limpieza in situ (CIP en inglés)k-and-place de Schubert hasta la fecha consta de 48 robots F4.
Véase el Equipos de alimentación e inserción en el sitio web de esta empresa.
Tipos de equipos de alimentación e inserción
- Equipos de recogida y colocación
- Sistemas de colocación/alimentación
Características:
- Suelto
- Robótica
- Rollos
- Pilas
Tipos de empaque:
- Ampolla o Vial


- Bolsa

- Blíster para tabletas

- Empaque blíster (Minorista)

- botella o Jarra

- Pack Ladrillo (Laminado)

- Lata o Bote

- Caja (Gabletop)

- Cartucho

- Empaque para embutidos

- Concha

- Taza, Bowl o Tubo

- Envoltura de flujo

- Envoltura

- Copa para empaque de porciones

- Bolsa

- Bolsita

- Manga

- Bolsa parable

- Empaque termoformado al vacio

- Bandeja

- Tubo (flexible)

- Empaque contraíble al vacío

- Empaque contraíble al vacío